Sensor dan Transduser
Tujuan Pembelajaran Umum
Setelah mempelajari bab ini diharapkan siswa memahami pengertian sensor dan transduser dan penggunaannya dalam sistem kendali.
Tujuan Pembelajaran Khusus
Setelah mempelajari topik per topik dalam bab ini, siswa diharapkan :
§ Dapat menyebutkan definisi dan perbedaan dari sensor, transduser dan alat ukur
§ Mampu menyebutkan persyaratan umum dalam memilih sensor dan transduser
§ Dapat menerangkan beberapa jenis sensor dan transduser yang ada di industri
§ Mengerti tentang klasifikasi sensor dan transduser secara umum.
Pendahuluan
Kemajuan ilmu pengetahuan dan teknologi dari masa ke masa berkembang cepat terutama dibidang otomasi industri. Perkembangan ini tampak jelas di industri pemabrikan, dimana sebelumnya banyak pekerjaan menggunakan tangan manusia, kemudian beralih menggunakan mesin, berikutnya dengan electro-mechanic (semi otomatis) dan sekarang sudah menggunakan robotic (full automatic) seperti penggunaan Flexible Manufacturing Systems (FMS) dan Computerized Integrated Manufacture (CIM) dan sebagainya.
Model apapun yang digunakan dalam sistem otomasi pemabrikan sangat tergantung kepada keandalan sistem kendali yang dipakai. Hasil penelitian menunjukan secanggih apapun sistem kendali yang dipakai akan sangat tergantung kepada sensor maupun transduser yang digunakan..
Sensor dan transduser merupakan peralatan atau komponen yang mempunyai peranan penting dalam sebuah sistem pengaturan otomatis. Ketepatan dan kesesuaian dalam memilih sebuah sensor akan sangat menentukan kinerja dari sistem pengaturan secara otomatis.
Besaran masukan pada kebanyakan sistem kendali adalah bukan besaran listrik, seperti besaran fisika, kimia, mekanis dan sebagainya. Untuk memakaikan besaran listrik pada sistem pengukuran, atau sistem manipulasi atau sistem pengontrolan, maka biasanya besaran yang bukan listrik diubah terlebih dahulu menjadi suatu sinyal listrik melalui sebuah alat yang disebut transducer
Sebelum lebih jauh kita mempelajari sensor dan transduser ada sebuah alat lagi yang selalu melengkapi dan mengiringi keberadaan sensor dan transduser dalam sebuah sistem pengukuran, atau sistem manipulasi, maupun sistem pengontrolan yaitu yang disebut alat ukur.
1.1. Definisi-definisi
D Sharon, dkk (1982), mengatakan sensor adalah suatu peralatan yang berfungsi untuk mendeteksi gejala-gejala atau sinyal-sinyal yang berasal dari perubahan suatu energi seperti energi listrik, energi fisika, energi kimia, energi biologi, energi mekanik dan sebagainya..
Contoh; Camera sebagai sensor penglihatan, telinga sebagai sensor pendengaran, kulit sebagai sensor peraba, LDR (light dependent resistance) sebagai sensor cahaya, dan lainnya.
William D.C, (1993), mengatakan transduser adalah sebuah alat yang bila digerakan oleh suatu energi di dalam sebuah sistem transmisi, akan menyalurkan energi tersebut dalam bentuk yang sama atau dalam bentuk yang berlainan ke sistem transmisi berikutnya”. Transmisi energi ini bisa berupa listrik, mekanik, kimia, optic (radiasi) atau thermal (panas).
Contoh; generator adalah transduser yang merubah energi mekanik menjadi energi listrik, motor adalah transduser yang merubah energi listrik menjadi energi mekanik, dan sebagainya.
William D.C, (1993), mengatakan alat ukur adalah sesuatu alat yang berfungsi memberikan batasan nilai atau harga tertentu dari gejala-gejala atau sinyal yang berasal dari perubahan suatu energi.
Contoh: voltmeter, ampermeter untuk sinyal listrik; tachometer, speedometer untuk kecepatan gerak mekanik, lux-meter untuk intensitas cahaya, dan sebagainya.
1.2. Peryaratan Umum Sensor dan Transduser
Dalam memilih peralatan sensor dan transduser yang tepat dan sesuai dengan sistem yang akan disensor maka perlu diperhatikan persyaratan umum sensor berikut ini : (D Sharon, dkk, 1982)
a. Linearitas
Ada banyak sensor yang menghasilkan sinyal keluaran yang berubah secara kontinyu sebagai tanggapan terhadap masukan yang berubah secara kontinyu. Sebagai contoh, sebuah sensor panas dapat menghasilkan tegangan sesuai dengan panas yang dirasakannya. Dalam kasus seperti ini, biasanya dapat diketahui secara tepat bagaimana perubahan keluaran dibandingkan dengan masukannya berupa sebuah grafik. Gambar 1.1 memperlihatkan hubungan dari dua buah sensor panas yang berbeda. Garis lurus pada gambar 1.1(a). memperlihatkan tanggapan linier, sedangkan pada gambar 1.1(b). adalah tanggapan non-linier.
b. SensitivitasSensitivitas akan menunjukan seberapa jauh kepekaan sensor terhadap kuantitas yang diukur. Sensitivitas sering juga dinyatakan dengan bilangan yang menunjukan “perubahan keluaran dibandingkan unit perubahan masukan”. Beberepa sensor panas dapat memiliki kepekaan yang dinyatakan dengan “satu volt per derajat”, yang berarti perubahan satu derajat pada masukan akan menghasilkan perubahan satu volt pada keluarannya. Sensor panas lainnya dapat saja memiliki kepekaan “dua volt per derajat”, yang berarti memiliki kepakaan dua kali dari sensor yang pertama. Linieritas sensor juga mempengaruhi sensitivitas dari sensor. Apabila tanggapannya linier, maka sensitivitasnya juga akan sama untuk jangkauan pengukuran keseluruhan. Sensor dengan tanggapan paga gambar 1.1(b) akan lebih peka pada temperatur yang tinggi dari pada temperatur yang rendah.
c. Tanggapan Waktu
Tanggapan waktu pada sensor menunjukan seberapa cepat tanggapannya terhadap perubahan masukan. Sebagai contoh, instrumen dengan tanggapan frekuensi yang jelek adalah sebuah termometer merkuri. Masukannya adalah temperatur dan keluarannya adalah posisi merkuri. Misalkan perubahan temperatur terjadi sedikit demi sedikit dan kontinyu terhadap waktu, seperti tampak pada gambar 1.2(a).
Frekuensi adalah jumlah siklus dalam satu detik dan diberikan dalam satuan hertz (Hz). { 1 hertz berarti 1 siklus per detik, 1 kilohertz berarti 1000 siklus per detik]. Pada frekuensi rendah, yaitu pada saat temperatur berubah secara lambat, termometer akan mengikuti perubahan tersebut dengan “setia”. Tetapi apabila perubahan temperatur sangat cepat lihat gambar 1.2(b) maka tidak diharapkan akan melihat perubahan besar pada termometer merkuri, karena ia bersifat lamban dan hanya akan menunjukan temperatur rata-rata.
1.3. Jenis Sensor dan TransduserPerkembangan sensor dan transduser sangat cepat sesuai kemajuan teknologi otomasi, semakin komplek suatu sistem otomasi dibangun maka semakin banyak jenis sensor yang digunakan.
Robotik adalah sebagai contoh penerapan sistem otomasi yang kompleks, disini sensor yang digunakan dapat dikatagorikan menjadi dua jenis sensor yaitu: (D Sharon, dkk, 1982)
a. Internal sensor, yaitu sensor yang dipasang di dalam bodi robot.
Sensor internal diperlukan untuk mengamati posisi, kecepatan, dan akselerasi berbagai sambungan mekanik pada robot, dan merupakan bagian dari mekanisme servo.
b. External sensor, yaitu sensor yang dipasang diluar bodi robot.
Sensor eksternal diperlukan karena dua macam alasan yaitu:
1) Untuk keamanan dan
2) Untuk penuntun.
Yang dimaksud untuk keamanan” adalah termasuk keamanan robot, yaitu perlindungan terhadap robot dari kerusakan yang ditimbulkannya sendiri, serta keamanan untuk peralatan, komponen, dan orang-orang dilingkungan dimana robot tersebut digunakan. Berikut ini adalah dua contoh sederhana untuk mengilustrasikan kasus diatas.
Contoh pertama: andaikan sebuah robot bergerak keposisinya yang baru dan ia menemui suatu halangan, yang dapat berupa mesin lain misalnya. Apabila robot tidak memiliki sensor yang mampu mendeteksi halangan tersebut, baik sebelum atau setelah terjadi kontak, maka akibatnya akan terjadi kerusakan.
Contoh kedua: sensor untuk keamanan diilustrasikan dengan problem robot dalam mengambil sebuah telur. Apabila pada robot dipasang pencengkram mekanik (gripper), maka sensor harus dapat mengukur seberapa besar tenaga yang tepat untuk mengambil telor tersebut. Tenaga yang terlalu besar akan menyebabkan pecahnya telur, sedangkan apabila terlalu kecil telur akan jatuh terlepas.
Kini bagaimana dengan sensor untuk penuntun atau pemandu?. Katogori ini sangatlah luas, tetapi contoh berikut akan memberikan pertimbangan.
Contoh pertama: komponen yang terletak diatas ban berjalan tiba di depan robot yang diprogram untuk menyemprotnya. Apa yang akan terjadi bila sebuah komponen hilang atau dalam posisi yang salah?. Robot tentunya harus memiliki sensor yang dapat mendeteksi ada tidaknya komponen, karena bila tidak ia akan menyemprot tempat yang kosong. Meskipun tidak terjadi kerusakan, tetapi hal ini bukanlah sesuatu yang diharapkan terjadi pada suatu pabrik.
Contoh kedua: sensor untuk penuntun diharapkan cukup canggih dalam pengelasan. Untuk melakukan operasi dengan baik, robot haruslah menggerakkan tangkai las sepanjang garis las yang telah ditentukan, dan juga bergerak dengan kecepatan yang tetap serta mempertahankan suatu jarak tertentu dengan permukaannya.
Sesuai dengan fungsi sensor sebagai pendeteksi sinyal dan meng-informasikan sinyal tersebut ke sistem berikutnya, maka peranan dan fungsi sensor akan dilanjutkan oleh transduser. Karena keterkaitan antara sensor dan transduser begitu erat maka pemilihan transduser yang tepat dan sesuai juga perlu diperhatikan.
1.4. Klasifikasi Sensor
Secara umum berdasarkan fungsi dan penggunaannya sensor dapat dikelompokan menjadi 3 bagian yaitu:
a. sensor thermal (panas)
b. sensor mekanis
c. sensor optik (cahaya)
Sensor thermal adalah sensor yang digunakan untuk mendeteksi gejala perubahan panas/temperature/suhu pada suatu dimensi benda atau dimensi ruang tertentu.
Contohnya; bimetal, termistor, termokopel, RTD, photo transistor, photo dioda, photo multiplier, photovoltaik, infrared pyrometer, hygrometer, dsb.
Sensor mekanis adalah sensor yang mendeteksi perubahan gerak mekanis, seperti perpindahan atau pergeseran atau posisi, gerak lurus dan melingkar, tekanan, aliran, level dsb.
Contoh; strain gage, linear variable deferential transformer (LVDT), proximity, potensiometer, load cell, bourdon tube, dsb.
Sensor optic atau cahaya adalah sensor yang mendeteksi perubahan cahaya dari sumber cahaya, pantulan cahaya ataupun bias cahaya yang mengernai benda atau ruangan.
Contoh; photo cell, photo transistor, photo diode, photo voltaic, photo multiplier, pyrometer optic, dsb.
1.5. Klasifikasi Transduser (William D.C, 1993)
a. Self generating transduser (transduser pembangkit sendiri)
Self generating transduser adalah transduser yang hanya memerlukan satu sumber energi.
Contoh: piezo electric, termocouple, photovoltatic, termistor, dsb.
Ciri transduser ini adalah dihasilkannya suatu energi listrik dari transduser secara langsung. Dalam hal ini transduser berperan sebagai sumber tegangan.
b. External power transduser (transduser daya dari luar)
External power transduser adalah transduser yang memerlukan sejumlah energi dari luar untuk menghasilkan suatu keluaran.
Contoh: RTD (resistance thermal detector), Starin gauge, LVDT (linier variable differential transformer), Potensiometer, NTC, dsb.
Tabel berikut menyajikan prinsip kerja serta pemakaian transduser berdasarkan sifat kelistrikannya.
Tabel 1. Kelompok Transduser
Parameter listrik dan kelas transduser | Prinsip kerja dan sifat alat | Pemakaian alat |
Transduser Pasif | ||
Potensiometer | Perubahan nilai tahanan karena posisi kontak bergeser | Tekanan, pergeseran/posisi |
Strain gage | Perubahan nilai tahanan akibat perubahan panjang kawat oleh tekanan dari luar | Gaya, torsi, posisi |
Transformator selisih (LVDT) | Tegangan selisih dua kumparan primer akibat pergeseran inti trafo | Tekanan, gaya, pergeseran |
Gage arus pusar | Perubahan induktansi kumparan akibat perubahan jarak plat | Pergeseran, ketebalan |
Transduser Aktif | ||
Sel fotoemisif | Emisi elektron akibat radiasi yang masuk pada permukaan fotemisif | Cahaya dan radiasi |
Photomultiplier | Emisi elektron sekunder akibat radiasi yang masuk ke katoda sensitif cahaya | Cahaya, radiasi dan relay sensitif cahaya |
Termokopel | Pembangkitan ggl pada titik sambung dua logam yang berbeda akibat dipanasi | Temperatur, aliran panas, radiasi |
Generator kumparan putar (tachogenerator) | Perputaran sebuah kumparan di dalam medan magnit yang membangkitkan tegangan | Kecepatan, getaran |
Piezoelektrik | Pembangkitan ggl bahan kristal piezo akibat gaya dari luar | Suara, getaran, percepatan, tekanan |
Sel foto tegangan | Terbangkitnya tegangan pada sel foto akibat rangsangan energi dari luar | Cahaya matahari |
Termometer tahanan (RTD) | Perubahan nilai tahanan kawat akibat perubahan temperatur | Temperatur, panas |
Hygrometer tahanan | Tahanan sebuah strip konduktif berubah terhadap kandungan uap air | Kelembaban relatif |
Termistor (NTC) | Penurunan nilai tahanan logam akibat kenaikan temperatur | Temperatur |
Mikropon kapasitor | Tekanan suara mengubah nilai kapasitansi dua buah plat | Suara, musik,derau |
Pengukuran reluktansi | Reluktansi rangkaian magnetik diubah dengan mengubah posisi inti besi sebuah kumparan | Tekanan, pergeseran, getaran, posisi |
Sumber: William D.C, (1993)
Contoh Soal :
1. Apa saja peranan dan fungsi sensor dalam sistem kendali industri ?
2. Sebutkan syarat-syarat dalam memilih sensor yang baik ?
3. Sebutkan beberapa jenis sensor yang ada pada sebuah robotik ?
Latihan :
1. Apa yang dimaksud dengan sensor, transduser dan alat ukur
2. Jelaskan perbedaan ketiganya.
3. Persyaratan umum sensor dan transduser adalah linearitas, sensitivitas dan tanggapan respon. Jelaskan maksud dari masing-masing syarat tersebut.
4. Jelaskan perbedaan antara transduser aktif dan transduser pasif.
Review :
1. Jelaskan dengan gambar yang dimaksud dengan tanggapan linear dan non linear ?
2. Adakah ketentuan lain yang harus diketahui dalam memilih sensor dan transduser
3. Apa fungsi dan kegunaan external sensor pada sebuah robot ?
4. Sebutkan beberapa buah transduser aktif dan transduser pasif yang anda ketahui ?
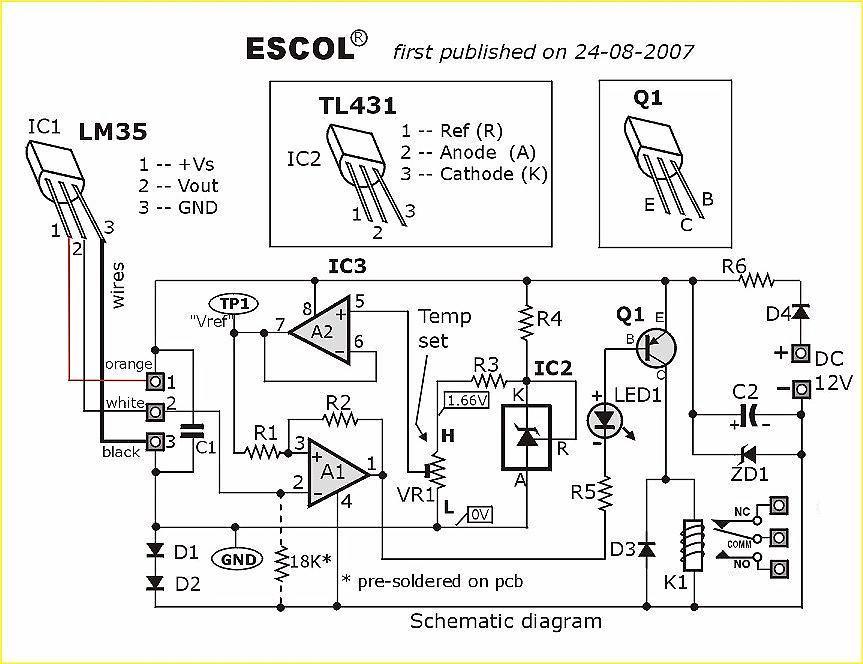
Contoh Aplikasi Rangkaian Sensor
 Ini merupakan sebuah sirkuit elektronik yang dapat digunakan sebagai rangkaian/pengontrol otomatis suhu. Sirkuit saklar sebuah miniatur relay HIDUP atau MATI sesuai dengan suhu terdeteksi oleh satu keping sensor suhu LM35. Bila LM35 mendeteksi suhu yang lebih tinggi dari tingkat preset (ditetapkan oleh VR1), maka relay akan berkerja. Ketika suhu berada di bawah preset suhu, relay adalah tidak akan memberikan tenaga kepada beban yang akan kita gunakan.
Ini merupakan sebuah sirkuit elektronik yang dapat digunakan sebagai rangkaian/pengontrol otomatis suhu. Sirkuit saklar sebuah miniatur relay HIDUP atau MATI sesuai dengan suhu terdeteksi oleh satu keping sensor suhu LM35. Bila LM35 mendeteksi suhu yang lebih tinggi dari tingkat preset (ditetapkan oleh VR1), maka relay akan berkerja. Ketika suhu berada di bawah preset suhu, relay adalah tidak akan memberikan tenaga kepada beban yang akan kita gunakan.
Misalnya saja beban yang kita pakai adalah Lampu, atau kipas angin. Rangkaian ini dapat diaktifkan melalui tegangan AC atau tegangan DC 12V dengan pasokan (100mA min.)
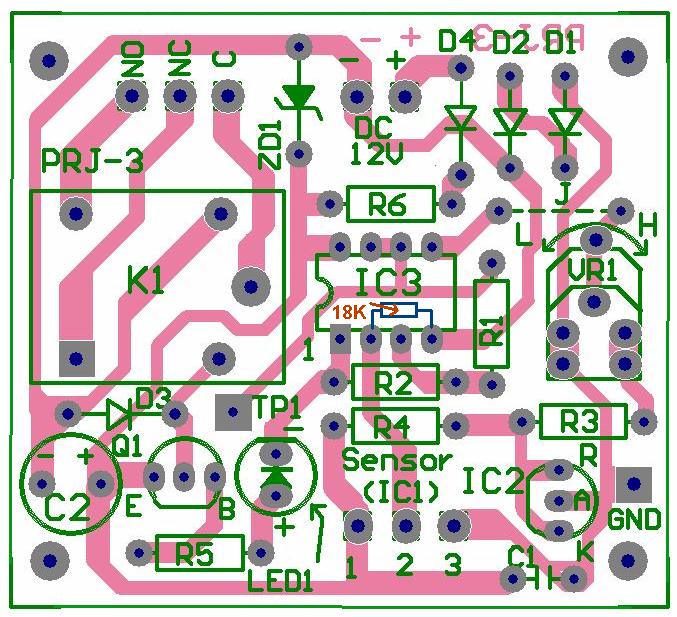
Download : schematic, layout and PCB (pdf)
Contoh Aplikasi Rangkaian Sensor
LM35 Sebagai Sensor Suhu
 Ini merupakan sebuah sirkuit elektronik yang dapat digunakan sebagai rangkaian/pengontrol otomatis suhu. Sirkuit saklar sebuah miniatur relay HIDUP atau MATI sesuai dengan suhu terdeteksi oleh satu keping sensor suhu LM35. Bila LM35 mendeteksi suhu yang lebih tinggi dari tingkat preset (ditetapkan oleh VR1), maka relay akan berkerja. Ketika suhu berada di bawah preset suhu, relay adalah tidak akan memberikan tenaga kepada beban yang akan kita gunakan.
Ini merupakan sebuah sirkuit elektronik yang dapat digunakan sebagai rangkaian/pengontrol otomatis suhu. Sirkuit saklar sebuah miniatur relay HIDUP atau MATI sesuai dengan suhu terdeteksi oleh satu keping sensor suhu LM35. Bila LM35 mendeteksi suhu yang lebih tinggi dari tingkat preset (ditetapkan oleh VR1), maka relay akan berkerja. Ketika suhu berada di bawah preset suhu, relay adalah tidak akan memberikan tenaga kepada beban yang akan kita gunakan.Misalnya saja beban yang kita pakai adalah Lampu, atau kipas angin. Rangkaian ini dapat diaktifkan melalui tegangan AC atau tegangan DC 12V dengan pasokan (100mA min.)
Download : schematic, layout and PCB (pdf)
{kind=link}
{kind=link}
Perangkat Lunak Komputer
Perangkat Lunak (software) merupakan suatu program yang dibuat oleh pembuat program untuk menjalankan perangkat keras komputer. Perangkat Lunak adalah program yang berisi kumpulan instruksi untuk melakukan proses pengolahan data. Software sebagai penghubung antara manusia sebagai pengguna dengan perangkat keras komputer, berfungsi menerjemahkan bahasa manusia ke dalam bahasa mesin sehingga perangkat keras komputer memahami keinginan pengguna dan menjalankan instruksi yang diberikan dan selanjutnya memberikan hasil yang diinginkan oleh manusia tersebut.
Perangkat lunak komputer berfungsi untuk :
Sistem Operasi yaitu program yang berfungsi untuk mengendalikan sistem kerja yang mendasar sehingga mengatur kerja media input, output, tabel pengkodean, memori, penjadwalan prosesor, dan lain-lain. Sistem operasi berfungsi sebagai penghubung antara manusia dengan perangkat keras dan perangkat lunak yang akan digunakan. Adapun fungsi utama sistem operasi adalah :
2. Program Aplikasi (Aplication Programs)
Program Aplikasi adalah perangkat lunak yang dirancang khusus untuk kebutuhan tertentu, misalnya program pengolah kata, mengelola lembar kerja, program presentasi, design grafis, dan lain-lain.
3. Bahasa Pemrograman (Programming Language)
Perangkat lunak bahasa yaitu program yang digunakan untuk menerjemahkan instruksi-instruksi yang ditulis dalam bahasa pemrograman ke bahasa mesin dengan aturan atau prosedur tertentu, agar diterima oleh komputer.
Ada 3 level bahasa pemrograman, yaitu :
4. Program Bantu (Utility)
Perangkat Lunak merupakan perangkat lunak yang berfungsi sebagai aplikasi pembantu dalam kegiatan yang ada hubungannya dengan komputer, misalnya memformat disket, mengopi data, mengkompres file, dan lain-lain.
Contoh software ini diantaranya :
Perangkat lunak komputer berfungsi untuk :
- Mengidentifikasi program
- Menyiapkan aplikasi program sehingga tata kerja seluruh perangkat komputer terkontrol.
- Mengatur dan membuat pekerjaan lebih efisien.
Perangkat lunak terbagi menjadi 4 macam, yaitu :
- Sistem Operasi (Operating System),
- Program Aplikasi (Application Programs),
- Bahasa Pemrograman (Programming Language),
- Program Bantu (Utility)
Sistem Operasi yaitu program yang berfungsi untuk mengendalikan sistem kerja yang mendasar sehingga mengatur kerja media input, output, tabel pengkodean, memori, penjadwalan prosesor, dan lain-lain. Sistem operasi berfungsi sebagai penghubung antara manusia dengan perangkat keras dan perangkat lunak yang akan digunakan. Adapun fungsi utama sistem operasi adalah :
- Menyimpan program dan aksesnya
- Membagi tugas di dalam CPU
- Mengalokasikan tugas-tugas penting
- Merekam sumber-sumber data
- Mengatur memori sistem termasuk penyimpanan, menghapus dan mendapatkan data
- Memeriksa kesalahan sistem
- Multitugas pada OS/2″, Windows ’95″, Windows ’98″, Windows NT”, /2000/XP
- Memelihara keamanan sistem, khusus pada jaringan yang membutuhkan kata sandi (password) dan penggunaan ID
2. Program Aplikasi (Aplication Programs)
Program Aplikasi adalah perangkat lunak yang dirancang khusus untuk kebutuhan tertentu, misalnya program pengolah kata, mengelola lembar kerja, program presentasi, design grafis, dan lain-lain.
3. Bahasa Pemrograman (Programming Language)
Perangkat lunak bahasa yaitu program yang digunakan untuk menerjemahkan instruksi-instruksi yang ditulis dalam bahasa pemrograman ke bahasa mesin dengan aturan atau prosedur tertentu, agar diterima oleh komputer.
Ada 3 level bahasa pemrograman, yaitu :
- Bahasa tingkat rendah (low level language)
- Bahasa tingkat tinggi (high level language)
- Bahasa generasi keempat (4 GL)
4. Program Bantu (Utility)
Perangkat Lunak merupakan perangkat lunak yang berfungsi sebagai aplikasi pembantu dalam kegiatan yang ada hubungannya dengan komputer, misalnya memformat disket, mengopi data, mengkompres file, dan lain-lain.
Contoh software ini diantaranya :
- Norton Utility
- Winzip
- Norton Ghost
- Antivirus